
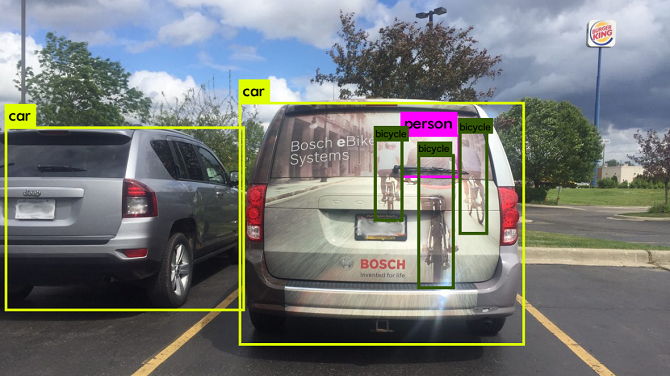
Các loại ô tô tự lái thường tự hào tuyên bố rằng chúng được trang bị "các kiểu thể loại" cảm biến – từ máy ảnh, siêu âm, cho đến radar, lidar (hệ thống dùng để vẽ bản đồ địa hình từ trên không) và hơn thế nữa. Nhưng nếu có bao giờ bạn tự hỏi tại sao chúng lại cần nhiều bộ phận cảm biến đến vậy, hãy nhìn vào bức ảnh dưới đây.
Theo MIT Technology Review, thứ mà bạn đang nhìn thấy được ngành công nghiệp ô tô tự lái gọi là "edge case" - trường hợp mà phương tiện có thể sẽ hành xử một cách không thể đoán trước được bởi phần mềm của nó phải xử lý một tình huống không bình thường khác với cách con người sẽ xử lý. Trong ví dụ này, phần mềm nhận diện hình ảnh nhận dữ liệu từ một máy ảnh thông thường đã bị lừa, khiến nó cho rằng hình ảnh những người đi xe đạp ở đằng sau xe ô tô là người thật.
Điểm mù đặc biệt này được xác định bởi các nhà nghiên cứu tại Cognata, một công ty chuyên sản xuất các thiết bị mô phỏng phần mềm - chủ yếu là các trò chơi trên máy tính có thể lập trình được và cực kì chi tiết - trong đó những nhà sản xuất ô tô có thể thử nghiệm các thuật toán lái xe tự động. Điều đó cho phép họ đưa ra được các tình huống "edge case" tương tự khi xe đang tự động lái và để chúng giải quyết các tình huống này mà không gặp phải rủi ro gây tai nạn.
Hầu hết những chiếc xe tự lái giải quyết được những vấn đề như hình ảnh khó phân tích này bằng cách sử dụng nhiều loại cảm biến khác nhau. "Lidar không thể cảm nhận được thủy tinh, radar chủ yếu cảm nhận kim loại, còn máy ảnh có thể bị hình ảnh đánh lừa", Danny Atsmon, CEO của Cognata giải thích, "Mỗi loại cảm biến được sử dụng trong xe tự lái đều có vai trò giải quyết một phần của thách thức này". Bằng cách lần lượt tìm hiểu dữ liệu nào có thể sử dụng để giải quyết chính xác với một số tình huống "edge case" đặc biệt - cả trong mô phỏng lẫn trong đời thật - xe ô tô có thể học cách giải quyết nhiều tình huống phức tạp hơn.
Tesla đã bị chỉ trích vì quyết định chỉ sử dụng cảm biến radar, máy ảnh và siêu âm để cung cấp dữ liệu cho hệ thống tự lái sau khi một trong số những phương tiện của họ không thể nhận ra một chiếc xe tải đi từ vùng sáng lớn và đâm thẳng vào nó, khiến tài xế của Tesla tử vong.
Những người chỉ trích cho rằng lidar là một yếu tố cần thiết trong bộ cảm biến - nó có thể hoạt động tốt trong cả ánh sáng mờ và ánh sáng chói, không giống như máy ảnh, và cung cấp nhiều chi tiết hơn radar và siêu âm. Nhưng như Atsmon chỉ ra, ngay cả lidar cũng có những điểm yếu, ví dụ như nó không thể phân biệt được giữa tín hiệu giao thông đèn xanh và đèn đỏ.
Bởi vậy, trường hợp an toàn nhất là các nhà sản xuất xe ô tô sử dụng một loạt các loại cảm biến, với phương châm "thừa hơn thiếu". Ít nhất thì những người đi xe đạp sẽ cảm ơn họ vì điều đó.




